异步电机是一种交流电机,主要作为电动机用 。异步电机运行时,在气隙中的旋转磁场与转子绕组之间存在相对运动 , 依靠电磁感应作用使转子绕组中感应电流,产生电磁转矩 , 从而实现机电能量的转换 。由于转子的转速与旋转磁场的转速不相等 , 所以称它为异步电机 。又因它的转子电流是靠电磁感应作用产生的,因此,异步电机也称为感应电机 。
从电磁关系上来看,异步电机和变压器很相似 。异步电机的定子绕组相当于变压器的一次绕组 , 转子绕组相当于变压器的二次绕组 。所以在学习了变压器的基础上来学习异步电机是比较容易的 。
一、异步电动机的主要用途与分类
异步电动机是工农业中用得最多的一种电动机,其容量从几十瓦到几千千瓦,在国民经济的各行各业应用极为广泛 。
例如,在工业方面:中小型的轧钢设备、各种金属切割机床、轻工机械、矿山上的卷扬机和通风机等,都用异步电机来拖动 。
在农业方面:水泵、脱粒机、粉碎机和其他农副产品加工机械 , 也都用异步电动机拖动 。
此外,在人民日常生活中 , 异步电动机也用得很多,例如,电扇、冷冻机、多种医疗机械等等 。总之 , 异步电动机应用范围广、需要量大,随着电气化自动化的发展 , 它在工农业生产和人民生活中占着很重要的地位 。
异步电动机也可以作为发电机使用,但一般只在特殊情况下才应用 。
异步电动机之所以用得这么普遍,主要是由于它的结构简单、制造容易、价格低廉、坚固耐用 , 并且还有较高的效率和适用的工作特性 。
但是,异步电机也有其缺点,异步电机必须从电网吸收落后的无功功率,因此它的功率因数总是小于1 。由于在电网的负载中,异步电机最多 , 它们所需要落后的无功功率对电网来说,是一个沉重的负担,既增加了输电过程的损耗,也妨碍了有功功率的输出 。当负载需要的电动机单机容量较大,而电网功率因数又比较低时 。最好还是采用同步电动机来拖动 。
异步电动机按定子绕组的相数分:有单相异步电动机和三相异步电动机 。在没有三相电源或者所需的功率很小时,应采用单相电动机 , 单相电动机的功率一般不超过3~4千瓦,在日常生活中,用得较多 。在工农业生产中,绝大多数用的是三相异步电动机 。
三相异步电动机有两种基本类型 。一种是鼠笼式异步电动机 , 这种电动机的转子绕组形状像一个笼子 。
在鼠笼式异步电动机中,又分为单鼠笼、双鼠笼和深槽式几种;另一种就是绕线式异步电动机,它的转子绕组和定子绕组基本上一样,也是三相绕组,可以联成星形或三角形 。
二、异步电动机的基本工作原理及运行状态
把异步电机的定子接到三相电源时,定子中会有三相电流流过 , 定子电流产生一系列的气隙旋转磁密 。其中起主要作用的是以同步速、顺着绕组相序旋转的基波气隙旋转磁密 。同步速的大小决定子电网的频率和绕组极对数 , 即

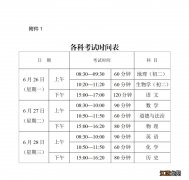
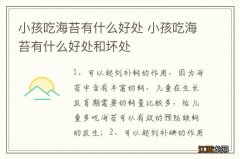
图5-1(a)是一台二极异步电机的示意图,n1箭头表示气隙磁密的旋转方向,最里边的那个大圆圈代表转子,其中两个小圆圈代表转子绕组的导体 , 先考虑转子还没有转起来的情况 。气隙旋转磁密形象地用N,S极表示,在图中所示的瞬间,N极在上面,S极在下面 。
于是,转子导体切割气隙旋转磁密而感应电势 , 它的方向如图5-1中的[图片]和⊙所示 。因为转子绕组是短路的,在转子绕组中会有电流 , 图5-1所示瞬间,导体中电流的方向假设与感应电势同相 。
根据气隙旋转磁密的极性和电流方向 , 利用左手定则可以看出,会产生一个与气隙旋转磁密同方向的电磁转矩作用在转子上 。如果这个电磁转矩能克服加在转子上的负载转矩,转子就能旋转起来,并加速旋转 。只要转子的转速低于同步转速,转子导体中的感应电势和电流方向不变,电磁转矩的方向也不变,是驱动性质的转矩 。

(a)电动机;(b)发电机;(c)电磁制动
图5-1 异步电机的三种运行状态
如果转子的转速加速到等于同步转速n1时,转子绕组和气隙旋转磁密之间就没有相对运动,当然转子绕组也就不再感应电势了,电流和电磁转矩统统都等于零 。这就是说,这种情况不可能维持下去 。
但是,只要n<n1,转子绕组和气隙旋转磁密之间就有相对运动,转子绕组里就会有电流,也就有电磁转矩作用在转子上 。当电磁转矩等于负载转矩时,转子就以恒速运行 。这种情况下,定子方面从电源吸收有功功率 。这就是异步电动机简单的运行原理 。可见,异步电动机转子的转速n不可能达到同步转速n1,一般总是略小于n1 , 异步二字就是由此而来的 。
通常把同步转速、和电动机转子转速二者之差与同步转速的比值叫做转差率(也叫转差或滑差),用s表示 。转差率的定义为:

s是一个没有单位的量,它的大小能反映电动机转子的转速 。例如,n=0时 , s=1;n=n1时,s=0;n>n1时,s为负;电动机转子的转向与气隙旋转磁密相反时,s>1 。
如果用另一台原动机拖动电动机,使它的转速高于同步转速n1运行,即n>n1,这时导体中电势、电流的方向以及产生的电磁转矩的方向也反了 , 如图5-1(b)所示 。这种情况下 , 电磁转矩对原动机来说 , 是一个制动转矩 。要保持电机转子继续转动 , 原动机必须给电机输入机械功率 。
于是,异步电机的定子方面由从电网吸收电功率,改变为向电网发出电功率,即处于发电机运行状态 。
如果用其他机械拖动电机转子向着气隙旋转磁密相反的方向转动,即,s>1,如图5-1(c) 。这时转子中电势、电流的方向仍然与电动机工作状态时一样,作用在转子上的电磁转矩方向仍然与气隙旋转磁密的方向一致 , 但是 。与转子的实际转向却相反了 。可见,这时的电磁转矩与拖动机械加在电机转子上的转矩的方向相反,互相平衡,而电磁转矩为制动转矩 。我们把这种情况叫做电机处于电磁制动运行状态 。
电机除了吸收拖动机械的机械功率外,还从电网吸收了电功率 。这两部分功率在电机内部都以损耗的方式最终转化为热能散发出来 。
三、异步电动机的结构
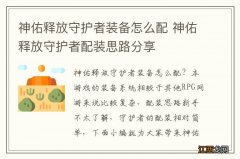
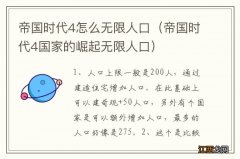
异步电动机的主要结构是由定子和转子两部分组成,定、转子中间是空气隙 。此外,还有端盖、轴承、机座等部件,图5-2是三相鼠笼式异步电动机的结构图 。

图5-2 三相鼠笼式异步电动机的结构图
1.定子
定子是异步电动机固定不动的部分 。由机座、定子铁芯和定子绕组组成 。
机座是电动机的外壳,起着支撑电机的作用,通常用铸铁铸成 。大机座也有用钢板拼焊起来的 。
定子铁芯是电动机磁路的一部分 , 装在机座内部 。它是一个中空圆柱体,外壁与机座配合,内壁开槽,槽内放定子绕组 。为了减少铁芯中的损耗,定子铁芯用0.5mm厚的硅钢片叠成 。
三相异步电机的定子绕组并不是都按星形接法联接,只有在大容量高电压时,才按星形接法联接 。一般中、小容量低电压的异步电机,通常把三相绕组的六根线头引出来,在外面根据需要把它接成三角形或星形接法 。这样,既可以使电机适用于两种不同等级的电源电压,例如星形接法用于380V电源;三角接法就可以用于220V电源上,又能满足起动的要求 , 即设计成在三角接法时,用于380V电源,起动时,改成星形接法,达到降压起动的目的 。
定子绕组用绝缘的铜导线绕成,嵌在定子槽内,绕组与槽壁间用绝缘材料隔开 。
2.气隙
异步电机的气隙比同容量直流电机的气隙要小得多,在中、小型异步电机中,一般为0.2~1.0mm 。这是因为异步电机的励磁电流是由电网供给的 , 气隙大时,励磁电流也就大,从而降低了电机的功率因数 。为了提高功率因数 , 应尽量把气隙做得小些 。但是气隙过小时,将使装配困难,运行不可靠 , 高次谐波磁场增强,从而使附加损耗增加 。
3.转子
电动机的转子是由转子铁芯、转子绕组和转轴组成的 。转子铁芯也是磁路的一部分,一般由硅钢片叠成,铁芯固定在转轴上 。
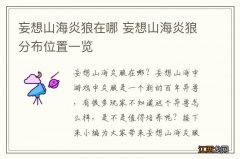
转子绕组如果是绕线式的,它可以联成星形或三角形 。一般小容量的接成三角形;中、大容量的都接成星形 。绕组的三根引出线接到三个集电环(集电环固定在转轴上),用一套电刷引出来 , 如图5-3所示 。
这就可以把外接电阻连联到转子绕组回路里去 。串电阻的目的是为了改善电动机的特性或者是为了调节转速 。
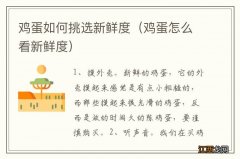
鼠笼式转子绕组的结构与定子绕组大不相同,在转子铁芯上也有槽,各槽里都有一根导条 。在铁芯的两端有两个瑞环,分别把所有导条伸出槽外的部分都联接起来,形成了短接的回路 。如果拿掉转子铁芯,绕组的形状就像一个老鼠笼子,如图5-4(a)所示 。导条的材料有用铜的 , 有用铝的 。如果是用铜的,就是把事先做好的裸铜条插入转子铁芯槽中,再用铜环套在两端铜条的头上,并焊接在一起;如果是用铝做绕组时,是用熔化了的铝液直接浇铸在转子铁芯槽内,连同瑞环和风扇叶一次铸成 , 如图5-4(b)所示 。

图5-3 绕线式异步电机定、转子绕组接线图

(a)铜条绕组;(b)铸铝转子
图5-4鼠笼型转子绕组
四、异步电动机的额定值
异步电动机的额定值通常会在铭牌上标出,包含下列内容:
(1)额定功率PN:指电动机在额定运行时转轴上输出的机械功率,单位是干瓦 。
(2)额定电压UN:指额定运行状态下加在定子绕组上的线电压,单位为伏 。
(3)额定电流IN:指电动机在定子绕组上加额定电压,轴上输出额定功率时,定了绕组中的线电流,单位为安 。
(4)额定额率f:我国规定工业用电的频率为50赫兹 。
(5)额定转速nN:指电动机定子加额定频率的额定电压,且轴上输出额定功率时电动机的转速,单位为转/分 。
(6)额定功率因数cosφN:指电动机在额定负载时定子边的功率因数 。
(7)绝缘等级与温升 。