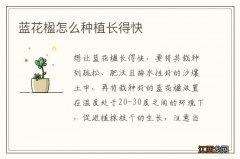
首先为了能够让信号模拟的“精确” , 研发团队为TacTip制作了像人类皮肤一样的“橡胶表层” , 在“橡胶表层”之下安装了一套类似于人类神经突触的针状凸起阵列 , 这些凸起阵列模拟了人类皮肤的中间表皮脊 。 组成这些阵列的“触角”坚韧又富有弹性 , 当TacTip开始进行“触摸”动作时 , 接触到物体表面的阵列会开始弯曲 , 通过弯曲的速度来产生人类触觉中的“快信号” , 避免TacTip拿不稳物品 。
▲TacTip的工作原理
其次 , 在这套“阵列”的下方 , TacTip的研发团队还为其安装了一个摄像头 , 用来监测“凸起阵列”的弯曲程度 , 这些摄像头记录下的“弯曲程度”会转化为人类触觉中的“慢信号” , 来让TacTip来判断出它“拿到了什么东西” 。
这套原理被来自芝加哥大学 , 研究触摸神经元基础的神经科学家Sliman Bensmaia所认可 , 他认为:人类多数的触觉都是源于皮肤力学 , TacTip的结构和方法恰好符合这一规律 。
当TacTip正式完成之后 , 研发团队中来自布里斯托尔大学的工程师Nathan Lepora及其同事开始对TacTip进行了首次测试 , 触摸得物品为“灯芯绒状材料” , 因为这种材料的表面纹理错落有致、触感多变 , 同时这次测试 , 将会以真人触觉的神经元信号为参考样本来评判出最后的结果 。
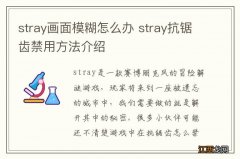
令人欣喜的是 , TacTip的测试首秀结果非常出色 , 根据其研发团队在4月5日于《皇家学会杂志:界面》(Journal of the Royal Society Interface)上发布的结果 , TacTip能够和真人一样精确地分辨出“灯芯绒状材料”的凸起变化 , 以及纹理之间的缝隙 , 其输出得神经元信号和真人接触“灯芯绒状材料”时输出得神经元信号高度匹配 。
▲TacTip反馈触摸神经元信息原理图
不过TacTip的不足之处也随之表现了出来——它并不如真人的指尖皮肤那样敏感 。 简单来说 , 人类的指尖皮肤可以感觉到类似铅笔芯宽窄的缝隙 , 但是想要被TacTip“触摸”到 , 需要将这种间隙提高两倍 。 研发工程师Nathan Lepora认为 , 只要团队能够开发出更薄 , 集成更多“凸起阵列”的橡胶表层 , 随着“凸起阵列”密度地增加 , TacTip的灵敏度将会进一步提高 。
于是在第二次测试开始前 , 研发团队不仅为TacTip增添了更多的“凸起阵列” , 同时在之前的结构基础上新增了麦克风 。 麦克风的加入是为了用于收集“凸起阵列”在接触到物体表面时 , 由于摩擦而产生的声音信息 , 以此来模拟人类深层皮肤中另一组感知“振动”的神经末梢 , 这让TacTip拥有了和人类一样能够感受物体表面粗糙程度的能力 。
“增强版”的TacTip就这样迎来了“增强版”的第二次测试 , 在这次测试中 , 测试人员加大了难度 , 他们尝试让TacTip分辨13种不同的纺织面料 。 当然最后的结果依然没有令人失望 , 在摄像头和麦克风的双重加持下 , TacTip输出得神经元信号依然比肩真人触摸时输出得神经元信号结果 。
TacTip的表现 , 令科奇大学从事可穿戴传感器工作的机械工程师Levent Beker发出了“机械手终于可以感人类手指所感”的赞叹 。 此前大力支持TacTip原理的Bensmaia在看到实际的测试结果后更是对其赞不绝口 , 他觉得 , 迄今为止没有其他人采取过像TacTip一样有趣的方式来让机器人获得“触感” , 这非常酷 。 同时Bensmaia认为 , 可变形的TacTip可以直接套在机器人的机械手指或者脚趾上 , 帮助机器人检测、拾取和操纵物体 。
针对这样的设想 , TacTip研发团队的Leporar表示:“确实 , 如今的‘机器手’必须依靠机械臂和精确的编程才能完成工作 , 它们很难抓住细小而坚硬的物品 , 例如牙刷和钢笔 。 而TacTip可以不依靠编程 , 就能让机器人或者机械假肢处理各种形状和大小的物体 。 ”
相关经验推荐



![英雄联盟手游组团口令怎么获得?组团口令获取方法介绍[多图]](http://img1.jingyanla.com/220430/0421562022-0-lp.jpg)




- 旷视科技|钨线缆在手术机器人中的运动控制
- 三星|50倍变焦+骁龙870+三星HM2,跌至1999元,“跳水价”1300元离场
- 北京市|这4种生活小家电,看似“多此一举”,幸福感很强!你用过几种?
- 机器人|别让低俗内容扼杀你的灵商
- 智能手机|鸿蒙系统手机,充电时居然还能下“樱花雨”太美了!不会用可惜了
- 红米手机|vivo量产5800mAh新机,定名“vivoT2”!性价比足了
- 5G|5G超清视话,做什么才会更“香”
- 苹果|速度大提升!苹果35W充电器出炉,这次充电又“超速”了?
- iPhone|买完不后悔系列,目前这4款手机最值得买,几乎“零”差评
- 笔记本|疫情形势依旧严峻,做好家电“硬储备”