文章图片

文章图片
文章图片
编译 | 知淮
编辑 | 云鹏
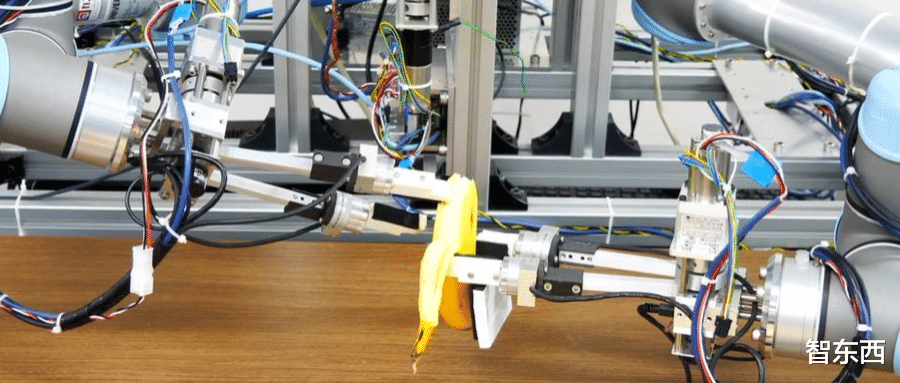
智东西4月11日消息 , 一直以来 , 类人型机器人的研发 , 都是朝着复现人类的行为 , 继而辅助人类生活的方向发展着 。 近日 , 来自英国以及日本的相关研究人员 , 对外释放了一些全新的技术 , 这些技术能够让机器人拥有“和人类一样的触觉” , 并且可以令机器人从事诸如“帮助人类穿衣服、剥香蕉”等这样更加精细的操作 。
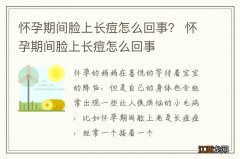
▲“人工指尖”正在触摸球类玩具
在这些技术中 , 有利用“人工神经元”对机器人进行反复训练的成果 , 也有“人造指尖”这样新元件加持下的全新突破 。 这些技术的真正铺开应用 , 将会给工业制造、医疗以及劳动力短缺等问题带来新的解决方案 。
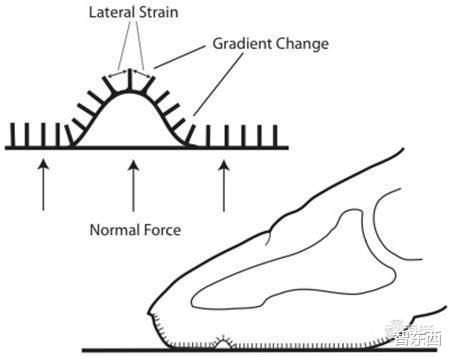
一、3D打印“人造指尖” , 赋予机器人比肩真人的触觉接触是人类感知世界的最直接方式 , “触觉”是人体神经系统中的重要组成部分 , 它在人类之间的情感互动中起着重要作用 。 皮肤和皮肤下覆盖的神经则是将“感觉”传达给大脑的桥梁 。 触觉帮助人类分辨物体 , 最后大脑控制双手 , 选择拿捏它们的力道 。 但是对于金属和电路组成的机器人来说 , 如何才能在它们身上复现人类的“触觉”呢?
英国布里斯托大学的研究人员给出了解决方案——TacTip(人造指尖) , 也称“光触觉传感器” 。 伦敦大学研究“触摸行为”的Mandayam Srinivasan称TacTip为:“自然触摸和人工触摸的近距离接触 , 这是改进机器人‘触摸方案’的必要步骤 。 ”
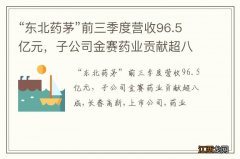
▲装备了TacTip的机器人成功拿起千纸鹤
TacTip原型机的诞生最早可以追溯到2009年 , 当时布里斯托大学的研究人员以人类皮肤为灵感 , 手工组装出了第一个“人造指尖” 。 但是受制于当时的技术 , 第一个“人造指尖”并不像真人手指一般纤细 , 它足足有罐装汽水一般大小 。 而后随着3D打印技术的飞速发展 , 终于在2018年 , 研发团队依托于3D打印技术 , 将“人造指尖”的体积压缩到了成人大脚趾的大小 。
同时得益于3D打印技术能够为“人造指尖”创造类似于人类皮肤的多层结构 , 研发团队近期已经将“人工神经网络”集成到了“人造指尖”中 。 至此 , “完全体”的TacTip正式落地 。
长期以来 , 工程师们一直试图让机器人像人一样灵巧 , 配备“人工神经网络”纵然是解决方案之一 , 但是来自伦敦大学的触摸研究员Mandayam Srinivasan却表示:“目前机器人的触摸结果反馈仍然远远低于人类 。 ”不过TacTip的研发团队似乎找出了更为理想的解决方案 , 那就是“人类触觉”和“机器反应”的相通点——信号 。
当人类的指尖皮肤与物体接触时 , 遍布皮肤的神经末梢通过突触的变形向大脑传递“摸到东西”的指令 , 之后神经会向大脑发送“快和慢”两种信号 , “快速”信号来帮助我们避免物品掉落 , “滞后”的信号则用来传达物体的形状 。 相信大家已经快要看出个大概了 , 触觉反馈到大脑是以神经信号的方式 , 指令反馈到机器人是以数字信号的方式 , 两者的形式都是“信号” , 如果能精确的用数字信号模拟神经信号传输给机器人 , 那么或许就能让机器人拥有比肩真人的触觉 。 TacTip的原理正式如此 。
相关经验推荐








- 旷视科技|钨线缆在手术机器人中的运动控制
- 三星|50倍变焦+骁龙870+三星HM2,跌至1999元,“跳水价”1300元离场
- 北京市|这4种生活小家电,看似“多此一举”,幸福感很强!你用过几种?
- 机器人|别让低俗内容扼杀你的灵商
- 智能手机|鸿蒙系统手机,充电时居然还能下“樱花雨”太美了!不会用可惜了
- 红米手机|vivo量产5800mAh新机,定名“vivoT2”!性价比足了
- 5G|5G超清视话,做什么才会更“香”
- 苹果|速度大提升!苹果35W充电器出炉,这次充电又“超速”了?
- iPhone|买完不后悔系列,目前这4款手机最值得买,几乎“零”差评
- 笔记本|疫情形势依旧严峻,做好家电“硬储备”