文章图片
文章图片
【浏览器|DELMIA软件弧焊仿真:机器人运行路径轨迹精度文件介绍与配置方法】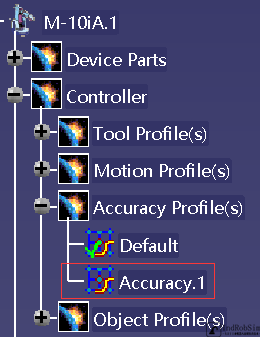
文章图片

文章图片
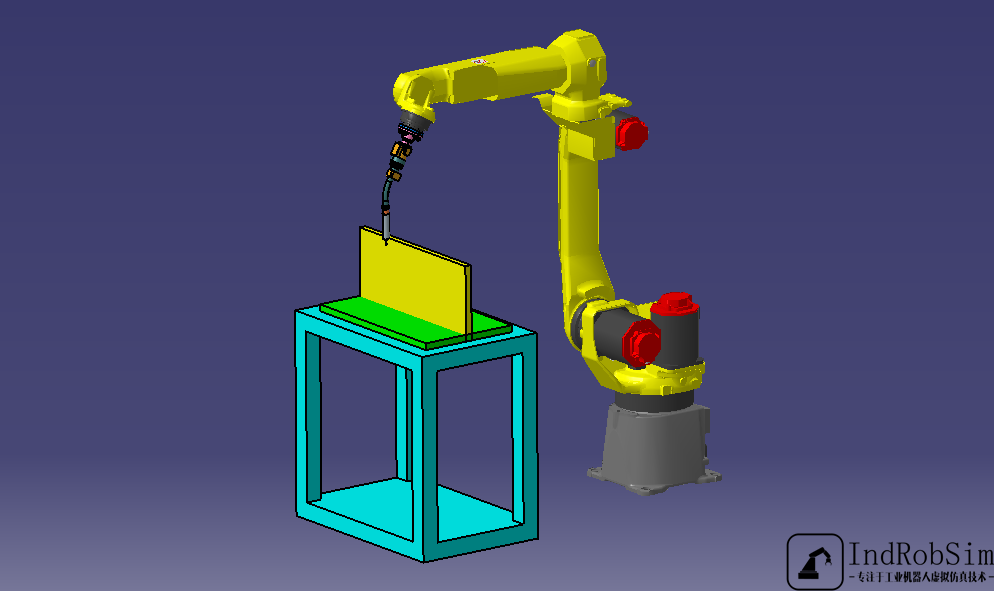
问题描述及解决方法?问题描述:前几期介绍了DELMIA软件自动生成机器人弧焊焊接程序的方法 , 但是机器人在仿真运行时并不连贯流畅 , 而是会出现卡顿现象 , 这是什么原因?该如何解决呢?
成因分析:之所以出现卡顿现象 , 是因为机器人在运行到除焊接起始点与结束点以外的其他自动生成的示教点(或目标点)时 , 会在示教点附近先减速直到准确停止在示教点上 , 然后再启动、加速 , 最后匀速向下一个示教点运行 , 如此重复每一个示教点 , 就会出现卡顿现象了 。
解决方法:真实的机器人遇到这种问题 , 可以通过配置机器人运行路径轨迹的精度数据来解决 , 如ABB机器人的区域数据(zonedata)、FANUC机器人的定位类型等 。 在DELMIA软件中仿真运行的机器人也可以通过配置精度数据来解决这一问题 , 这些精度数据都在机器人控制器的精度配置文件中 , 需要仿真人员根据需要进行单独配置 。 精度数据不只是影响机器人连续直线运动轨迹 , 对连续曲线、连续弧线、圆周运动影响更加突出 。 除焊接工艺应用外 , 机器人涂胶、喷漆、滚边、铣削、打磨、去毛刺等工艺应用也需要配置精度数据 。
机器人运行路径轨迹精度文件配置?所有机器人都有构成其控制器数据的配置文件 , 其中精度配置文件定义了有关机器人运行路径轨迹精确程度的数据 。
在DELMIA中打开机器人弧焊焊接虚拟仿真项目 , 将软件切换到“Device Task Definition”模块 。 在下方的Robot Controller工具条中点击“Accuracy Profile”命令按钮 , 然后选择要配置路径轨迹精度的机器人 , 弹出Accuracy Profile对话框 。
在Accuracy Profile对话框中可以新建或编辑精度配置文件参数 , 各个配置项目详细说明如下:
Name:定义机器人运行路径轨迹精度文件名称 , 配置文件定义完成后该名称会在PPR浏览树中显示 。
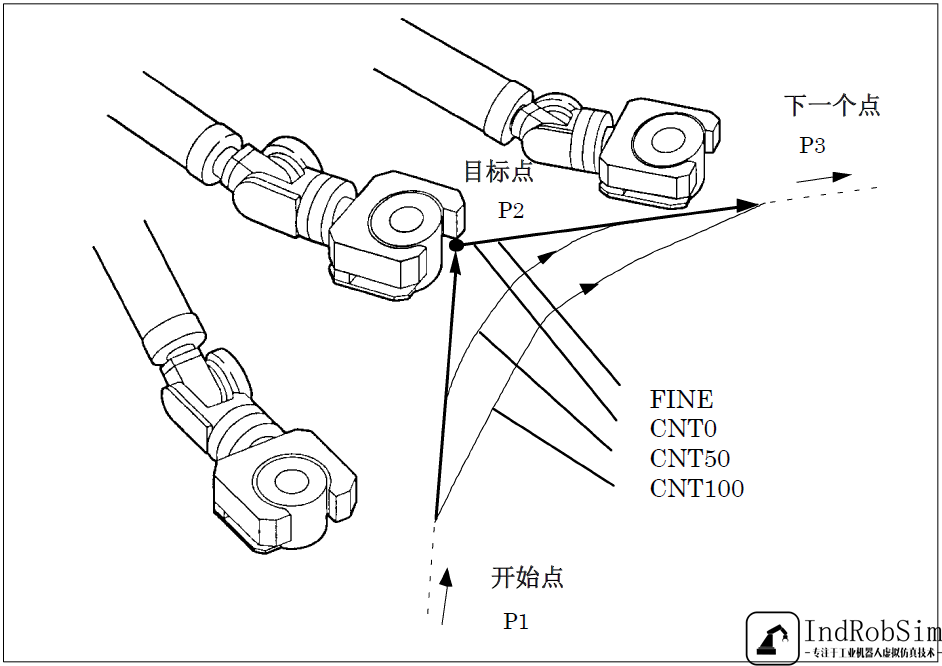
Flyby Mode:指定是否开启飞越模式 。 当选择“On”时 , 飞越模式开启 , 此时机器人运行时只接近目标点 , 但不会停在目标点上(即目标点只是一个通过点) , 机器人实际的运动轨迹取决于下方精度类型(Accuracy Type)和精度值(Accuracy Value)设定的参数值 。 当选择“Off”时 , 飞越模式关闭 , 机器人运行到目标点上时停止 , 即无论精度类型和精度值如何设置 , 运动都处于点对点模式 。 一种特殊情况是飞越模式开启后将Accuracy Value设置为0 , 这时机器人的运动被认为是点对点的 , 等效于飞越模式关闭 。
Accuracy Type:指定精度参数类型 。 当设定为距离(Distance)时 , 准确度值定义了以机器人TCP运动到的目标点为中心的虚拟球体的半径 , 相当于ABB机器人的区域数据设置为z或FANUC机器人定位类型设置为CNT 。 机器人的TCP到达该虚拟球体上的任何一点时 , 转弯运动就开始了 。 因此 , 当距离值不为零时 , 机器人的TCP永远不会到达目标点位置 。 当设定为速度(Speed)时 , 机器人转弯运动程度是减速时间的函数 。 在直线运动的情况下 , 如果精度值设置为100% , 则从减速曲线的起点开始直接运动到下一点 , 即机器人在目标点处不减速 , 这会产生最大的转弯半径 。 如果精度值设置50% , 则在经过一半的减速时间后开始向下一个点运动 , 即机器人将减速到完全停止所需的一半时间 , 然后开始下一个运动语句 。 如果精度值设置为0% , 则机器人运动遵循标准加速/减速曲线 , 相当于ABB机器人的区域数据或FANUC机器人定位类型均设置为FINE 。
相关经验推荐









- 流氓软件|流氓软件完全卸载攻略,3个步骤即可完杀!亲测有效百战百胜
- 软件测试|软件测试好书推荐《高级软件测试卷1:高级软件测试分析师》
- 浏览器|浏览器:谷歌始终统治着我们的世界!
- 软件|Redmi?旗舰新机曝光:超窄边框一体全面屏设计,外观很惊艳
- 软件|iOS 上有哪些新奇 App?看看有没有你使用过的
- 软件|热钱涌入,大牌押宝,工业软件能弯道超车吗?
- 软件|打工人必备的软件,今天出事了
- 软件|苹果IOS上最香的阅读软件——爱阅书香
- 软件|常用手机偷看“不良网站”?如果出现这个页面,你已经被盯上了
- 软件|标签打印软件如何制作利器盒标签