
文章图片

文章图片
文章图片

文章图片
文章图片

文章图片
概述MotoSimEG-VRC软件除了能够对安川机器人本体进行虚拟仿真以外 , 还可以对外部轴类机械设备进行虚拟仿真 , 如机器人行走轴、机器人变位机等 。 本期 , 就来介绍一下机器人行走轴虚拟仿真的操作方法 。
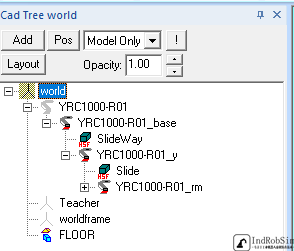
机器人行走轴模型拆分从运动机构的角度分析 , 机器人的行走轴大致可以分为两个部分 , 也就是导轨与滑台 。 其中 , 导轨是固定不动的部分 , 而滑台是相对运动的部分 。 机器人本体安装在滑台上 , 当滑台沿着导轨运动时 , 机器人也就实现了行走 。
一般情况下 , 仿真人员从设计人员手里拿到的行走轴模型都是一个完整的装配体 , 单独的装配体是不能在MotoSimEG-VRC软件中创建运动机构的 。 因此 , 仿真人员需要先将装配体模型拆分 , 分别提取出行走轴导轨模型和行走轴滑台模型 , 拆分过程可以在机械设计软件中进行 , 拆分后的模型如下图所示 。
机器人系统创建首先创建机器人虚拟仿真项目 , 然后新建机器人控制器 , 控制器新建过程中需要设置的各个参数如下所示:
Create Controller:New VRC Controller (no file)
Controller Type:YRC1000
R1:1-06VX225-A0*(SP210)
Application:MOTOR GUN
以上相关参数也可以根据自己的实际需求进行选取配置 , 全部配置完成后点击“Standard Setting Execute”按钮 , 以标准模式创建机器人控制器 。
机器人控制器创建完成后 , 在虚拟仿真环境中出现选择的机器人模型 , 如下图所示 。
机器人外部轴配置通常情况下 , 行走轴都是作为机器人外部轴类型的设备 。 当然 , 如果不涉及到与机器人的联动插补类运动也可以作为普通的设备 。 本案例中的行走轴也是作为机器人的外部轴 , 因此需要对机器人的外部轴参数进行配置 。
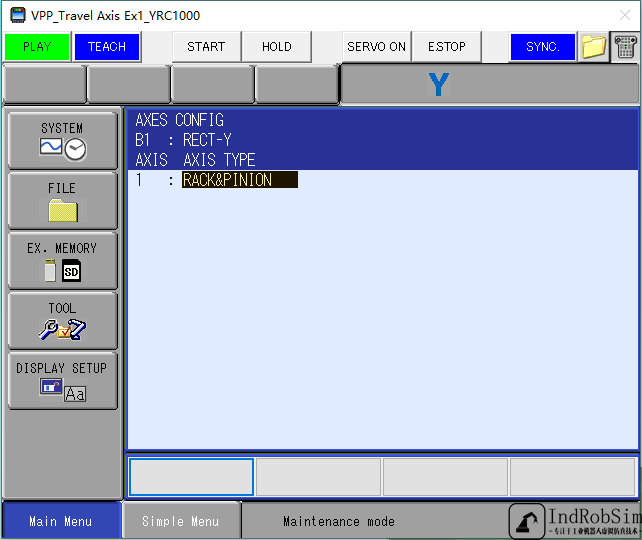
在“Controller”菜单栏下点击“Maintenance Mode”命令按钮 , 以维护模式打开机器人虚拟示教器 , 配置机器人系统参数 。 这一步也可以在新建机器人控制器时直接点击“Maintenance Mode Execute”按钮 , 即以维护模式创建机器人控制器 , 同样可以配置机器人系统参数 。
虚拟示教器显示界面中 , 依次点击“Main Menu”→“SYSTEM”→“SETUP” , 进入设置界面 。
选择“CONTROL GROUP”进入控制组界面 , 然后在“B1”后选择“DETAIL” , 进入MACHINE LIST界面 。 在其中选择“RECT-Y” , 即沿着机器人Y轴方向运动的直线运动机构 。 最后在虚拟示教器操作面板上按“SELECT”键 , 进入CONNECT(STO)界面 。
值得注意的是在CONTROL GROUP界面中 , R代表机器人本体控制组 , B代表外部直线运动机构控制组(如机器人行走轴) , S代表外部旋转运动机构控制组(如伺服焊枪、变位机等) 。
相关经验推荐











- |“诚迈科技”联手NVIDIA打造智能驾驶汽车“慧眼”
- 芯片|寒武纪:子公司“行歌科技”现已开展车载智能芯片相关业务
- 智能电视|html字体图标怎么使用?分分钟学会!
- 智能投影仪|12GB+256GB+5000万,顶配产品跌至3399元,高端旗舰重回性价比
- 诺基亚|智能手机游戏影响孩子学习,寒假送诺基亚215 4G这款功能机最合适
- 智能手机|情人节有哪些礼物可以送给男朋友的,情人节送礼推荐
- 平板电脑|内置海量学习资源,类纸护眼屏,爱华辅导智能学习平板电脑评测
- wi-fi|飞睿智能高精度定位,UWB室内定位技术,定位精度高抗干扰能力强
- 智能制造|【教程】一劳永逸!解决电脑、手机各平台看小说问题
- 数字化转型|数字化转型必将经历的三个阶段:数据化、智能化、智慧化