
文章图片

文章图片
文章图片
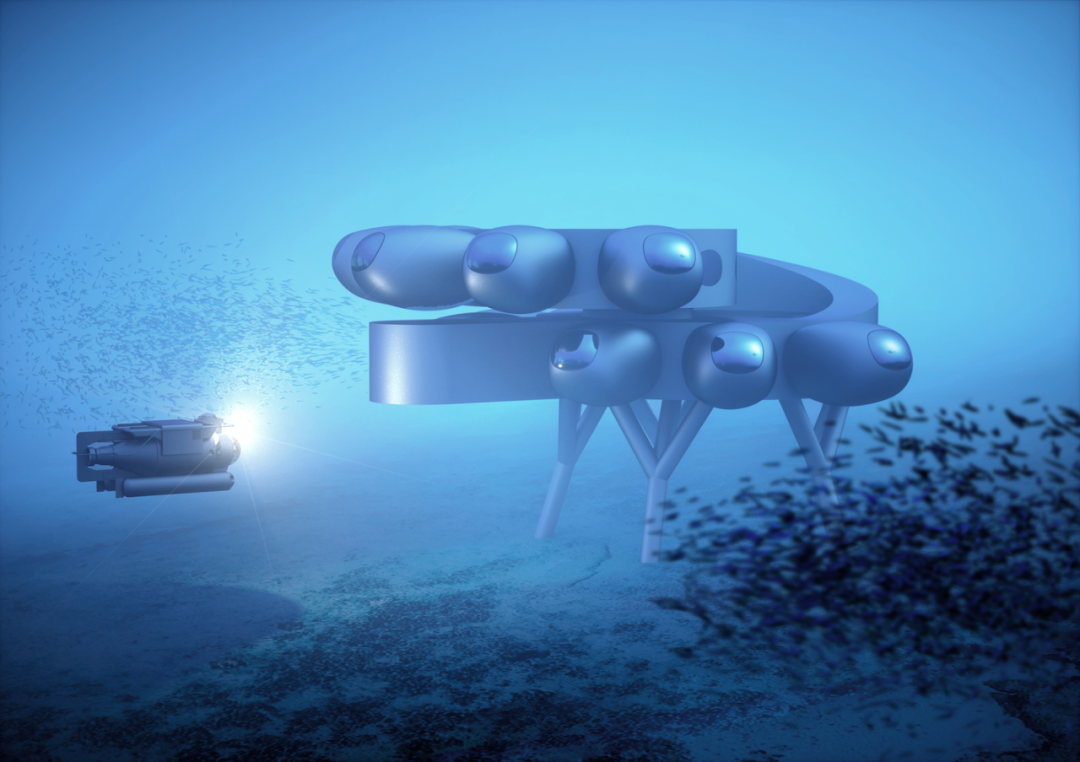
科学家的研究成果为机器人领域的研究做出了贡献 , 它集成了一个在水下仿生运动、远程控制的端到端系统 , 并可作为水下生物研究的一个水下观测器 。 研究人员提出了一种仿生软机器鱼 , 能够沿着三维轨迹游动 , 自主浮力控制 , 以观察海洋中的珊瑚礁生物群落 。 更具体地说 , 这项工作的贡献包括第一个软机器鱼原型机 , 能够3D可控运动 , 用于水下持续作业 , 自主深度控制通过潜水飞机和基于活塞的微型浮力控制单元 , 采用小型端到端水声通信系统进行水下遥控 。
在0至18米的深度进行遥控 , 海洋实验证明了这一点 。科学家开发了机器鱼 , 一种完全嵌入式的独立水下系统 , 它可以独立游泳 , 并接收人类潜水员的高级命令 。 它以一种循环的方式摆动它柔软的尾巴来推动自己 , 并调整这种波动来向前游或转弯 。 尾部运动是由排量泵的循环流动产生的 , 调整泵入尾部两侧的相对液体量就可以产生旋转运动 。
垂直游泳是通过潜水飞机和BCU实现的 。 这条鱼的顶端装有一个鱼眼照相机 , 用来观察周围的环境 。 一个声学换能器也安装在刚性背鳍的前面 , 倾斜向上 , 接收来自人操作潜水员接口模块的命令 。液压系统在低、中和高频率下执行波动尾驱动 , 以实现一定范围的游泳速度 。 鱼通过调整尾巴的基线偏转角度来左右转动 。 鱼在每个方向上都有三个水平的偏转 , 最大基线偏转约为三十度 。
同样的 , 这种鱼可以在每个方向上三个水平方向倾斜它的潜水飞机 , 最大倾斜度为四十五度 。人类通过一个定制设计的单向声通信调制解调器远程控制机器鱼 。 该系统由潜水员接口模块和声学接收器组成 。 研究人员通过在一个大池中以不同的距离和深度以20比特/s的速率发送一系列200个交替比特来描述通信调制解调器的可靠性 。一名潜水员使用潜水员接口模块成功地引导机器人通过各种复杂的水下珊瑚礁环境 。
潜水员要求的推力水平 , 尾波频率 , 深度和转弯角度;在潜水的过程中 , 潜水员与鱼的距离更近 , 因此交流更可靠 。 科学家的分析集中在“稳定”命令上 , 即在1秒内不会立即出现不同命令;例如 , 潜水员在命令从最低音高过渡到最高音高时 , 会反复按“向上”箭头 , 导致中间音高状态暂时出现 , 但只有最后的命令状态才是重要的 。 如果鱼在10秒左右的超时时间内没有收到任何指令 , 它就会回到中性状态并关闭电机 。
这种暂时的沉默将有助于检测较弱的命令 。 在珊瑚礁实验中 , 机器人马达关闭时在10米范围内 , 马达打开时在5米范围内建立了有效的通信 。 影响通信的最大因素是环境复杂性、鱼马达的噪音和传输距离 。 靠近海岸线的其他实验表明 , 在一个浅层、杂乱的水下环境中 , 即使在电机噪声存在的情况下 , 该系统也可以进行长达10米的通信 。
【机器人|人类通过一个定制设计的单向声通信调制器,远程控制机器鱼】这条机器鱼有一个机载鱼眼相机 , 可以让远程操作员拍摄水下探索 。 这种设置减少了潜水员对被拍摄的海洋生物的影响 。 海洋实验表明 , 机器鱼能够在自然环境中 , 在水流存在的情况下进行三维可控运动 。 在海洋实验中 , 研究人员也对机器人近距离观察海洋生物并记录其反应的能力进行了初步的观察 。 机器鱼没有模仿任何特定种类的生物鱼的意图 , 除了黑色的镜头和声学换能器外 , 机器鱼是白色的 。
相关经验推荐










- 机器人|机器人的微控制器,通过读取压力传感器来连续记录深度
- 机器人|ICT的圣杯(二):数字生活的另类想象
- 笔记本|乌克兰为何能以小博大,已激战20天:俄乌战争成为人类首次AI战争
- 机器人|三星每日发布A33等中端机型,搭载Exynos 1280
- 机器人|5G颠覆一切的论调有点言过其实,未来是大数据的时代
- 机器人|对Ai的担忧,机器人三定律并不完美
- 扫地机器人|扫地机器人哪个牌子好?扫地机器人品牌PK
- 科沃斯|AI语音控制+AI视觉识别:科沃斯真AI扫拖机器人地宝T10 TURBO评测
- |最新成果丨张守祥教授:综采巡检机器人关键技术研究
- 机器人|为何苹果手机的使用寿命长?离不开这3项核心优势