
文章图片

文章图片
文章图片
速度、功率和耐用性是工业机器人的重要特点 。 工业机器人通常应用在汽车组装线上进行焊接、笨重工件的搬运操作 。 尽管使用先进的校准方法 , 但在执行部分任务中 , 工业机器人的位置精度仍不理想 。 现在 , 这一状况已被海德汉和其子品牌AMO的高精度输出端编码器改变 。
研发这款编码器的目的主要是为了满足航空航天应用的要求 , 航空航天业的大型工件必须高精度地进行加工 。 机床达到高精度不困难 , 但灵活性不足或专用机床和特殊加工车间的成本过高 。 可是 , 机器人可以轻松达到超大型工件的任何位置 , 例如飞机的机身 , 在机身上进行钻孔或铣削 。
精度的影响因素对于这类应用 , 刀具中心点(也就是机器人机械臂端头处的刀具)必须以足够高的精度进行定位和定向 。 传统工业机器人在这方面已接近其极限 。 导致偏差的因素有多个:
1)为达到所需的机动性 , 需要使用串联运动的机器人 , 例如六轴铰接式机器人 。
2)其中每个轴由齿轮传动的伺服电机驱动 。 其误差主要来自零位误差、反向间隙和连接弹性 。
3)在机械加工中 , 作用力和动态作用力影响机器人机械系统的刚性 , 因此影响绝对位置精度 。
借助先进的校准方法 , 现在可将刀具中心点的重复性定点运动精度控制在毫米的几个百分点以内 。 部分制造商的铰接式机器人的重复精度已达到ISO 9283标准的±0.1 mm要求 , 或更高的精度 。
但是 , 与机器人坐标系内可达到的重复绝对位置精度相比仍低10倍 。 根据机器人结构设计、最大范围和最大承重 , 铰接式机器人现在的绝对位置精度为±1 mm 。 这种精度无法满足航空航天等行业对精度的要求 。 因此 , 机器人制造商必须正视该问题 。
如果机器人的每个轴增设一套高精度的角度编码器或旋转编码器 , 机器人制造商将能显著提高机器人的绝对位置精度 。 增设的编码器是辅助编码器 , 安装在每个齿轮传动的后方 , 测量机器人每个关节的实际位置 。 在该设计方案中 , 这些编码器将解决零位误差和反向间隙问题 。 也能测量加工中各轴所承受的反作用力 。 所有这些因素将提高刀具中心点的绝对位置精度达70至80% 。
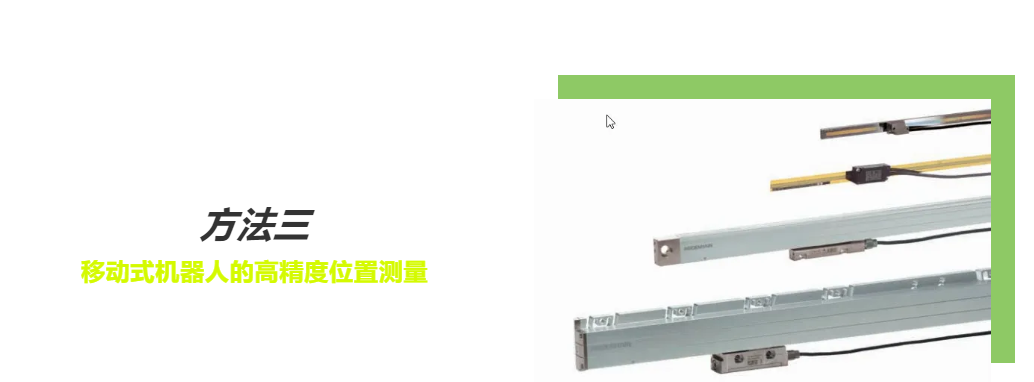
模块型角度编码器 , 例如海德汉光学扫描的ECA 4000 , 海德汉感应扫描的ECI 4000旋转编码器以及AMO WMR角度编码器均适用于这些应用 。 由于这些编码器采用模块型设计 , 包括栅鼓或尺带及独立的读数头模块 , 特别适用于大型空心轴和安装空间极其有限的应用 , 例如机器人的空间限制 。 这些辅助编码器的信号质量明显优于伺服电机内的旋转编码器 , 也就是说提供更高精度的位置反馈值 , 甚至在高动态运动期间 。
为达到大型工件或长件的所有加工位置 , 例如飞机机身或大型复合纤维工件的生产 , 机器人需沿直线轴在工件长度方向进行运动 。 为确保机器人的高精度地定位 , 海德汉提供直线电机驱动和长度达30 m的封闭式直线光栅尺 。 直线光栅尺的位置测量能补偿热位移和其它影响进给机构误差的因素 。 这些影响因素无法被滚珠丝杠螺距和电机内旋转编码器角度位置的传统位置检测方式检测到 。
相关经验推荐













- 智能机器人|iPhone13Pro镜头有必要保护吗?
- 中间件|大量的中间件框架已经出现,以促进机器人系统和许多异构实体之间的交互
- 机器人|先进的外科护理系统,包括机器人技术、信息技术等
- 机器人|微型传感器、人工智能和高带宽通信具有明显先进的机器能力
- 罗永浩|本体被用来表示从机器人中获得的原始数据,它们可用于高级决策代理
- 机器人|机器人操作系统已被选择为基础,并添加了更多的功能模块
- 机器人|远程手术的主要目标是将机器人部署到栖息地,并使用网络对其进行远程操作
- 航天|女生不可错过的笔电推荐!高颜值+硬实力,a豆14入手价低至3999
- 路由器|古老师又玩高科技,结果被机器人制裁,吃了一套天马流星拳招呼
- 基站|自动换水+拖布回洗+45°烘干!云鲸2代扫拖机器人真实体验