卡尔曼滤波的原理是使用观测值来动态的生成统计预测参数的 。
X(k)=AX(k-1) BU(k) W(k).(1)
Z(k)=HX(k) V(k).(2)
预测是通过(1)式中的W(K)和(2)式中的V(k)的噪声的统计“标准差”生成的 。有说是“协方差”可能和后面三个跌代式子混了 。
X(k|k)=X(k|k-1) Kg(k)(Z(k)-HX(k|k-1))………(3)
Kg(k)=P(k|k-1)H’/(HP(k|k-1)H’ R)………(4)
【如何确定卡尔曼滤波的观测矩阵】P(k|k)=(I-Kg(k)H)P(k|k-1)………(5)
(3)(4)(5)补充计算(1)(2)完成跌代过程 。H是“马尔科夫”链中的预测矩阵 。
相关经验推荐
-
金牛座2021年运势及运程 金牛座2021年翻身,2021年金牛座将有大事发生
-
石昊|石昊被囚禁修为散尽?其实这都是石皇的考验,一切都是幻境
-
-
WBG上限直接拉满!三名选手进周最佳!Theshy荣获MVP
-
-
梦幻西游仙灵店铺是每个角色必须学习的剧情技能|梦幻西游:仙灵店铺比卖体力更划算?五开玩家进行了测试
-
全面战争三国传奇武将与普通武将区别介绍 传奇与普通武将
-
-
床头只能朝西咋办呀 床头朝哪个方向最佳,床头的摆放最佳方向
-
小米科技|下半年这3部手机最值得买,几乎“零”差评,再用五年也没有压力
-
-
什么饺子馅好吃又健脾?饺子馅100种,你不知道的冷门小知识
-
-
-
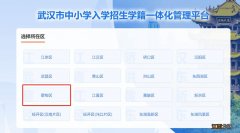
2023武汉蔡甸区幼升小政策文件 2023武汉蔡甸区幼升小政策
-
伽罗kpl皮肤介绍 王者荣耀伽罗kpl限定皮肤一览
-
-
?提灯与地下城金钥匙有什么用?提灯与地下城金钥匙怎么用
-
-