
文章图片

文章图片
文章图片
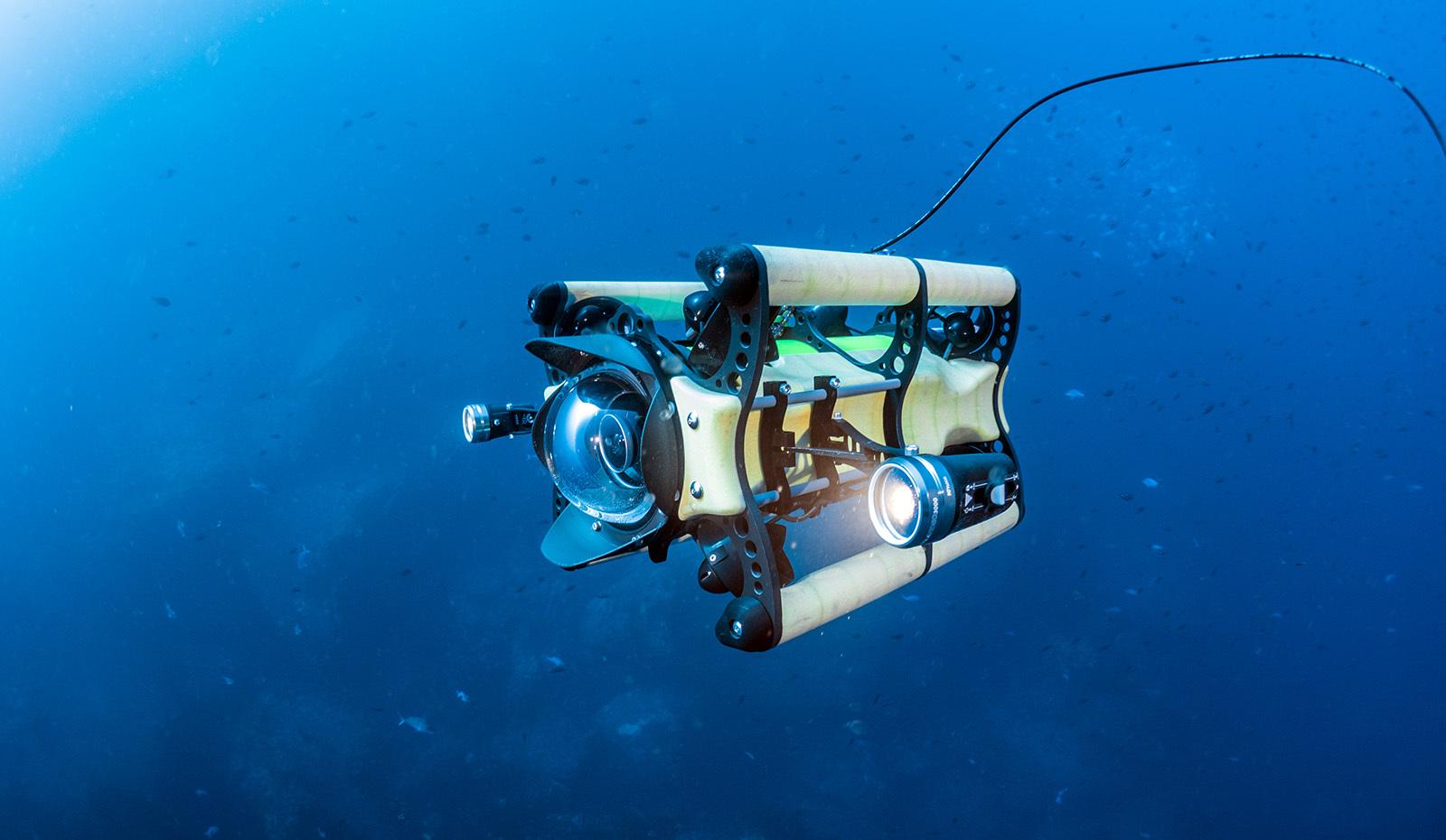
科学家评估了游泳池、鱼缸和海洋中的声学调制解调器 。 该系统首先在水箱和水池中进行评估 , 以在受控条件下测试调制解调器 。 由于封闭的配置、坚硬的墙壁和较浅的深度 , 这些环境促进了多径反射 , 近似于在公海部署中观察到的干扰类型 。 科学家在开阔的海洋中测试了整个系统 , 潜水员远程调整鱼的状态并将其导航到复杂水下环境中的兴趣点 。 在三天的时间里进行了六次潜水 , 探索斐济索莫索莫海峡 。
该位置提供了具有不同潮汐条件的众多珊瑚礁环境 , 允许在可以研究海洋生物相互作用和珊瑚礁生物群落的现实条件下评估索菲 。 机器人在每次潜水期间进行了约四十分钟的连续观察 , 在平均深度和最大深度十八米的情况下总共进行了约二百四十分钟的受控探索 。 科学家在浅海水域进行了另外九十分钟的预备游泳测试 , 以测试控制系统、通信和视频记录 。
所有这些测试都评估了索菲的仿生驱动的有效性以及用于远程控制的声学通信接口的可用性 。 操作员和索菲之间的距离通常在一到十米之间 , 两名或多名潜水员使用、佳能和相机在几米的距离内记录了机器人沿着珊瑚礁和跟随其他鱼的轨迹 。 在五次潜水中进行了定性观察 , 在此期间索菲探索了珊瑚礁环境 。 在每次潜水开始时调整磁力重量以获得中性浮力 , 然后通过声学调制解调器连续操作机器人 。 控制器和机器人之间的距离是变化的 , 以了解有效的通信范围 。
这条鱼被引导穿过珊瑚礁 , 尽可能接近有趣的环境特征和海洋生物 。 这种潜水提供了对索菲在受限和非受限区域的游泳能力、声学通信可靠性以及索菲对附近鱼类的影响的定性观察 。 考虑到设计约束 , 科学家设计了一种调制方案 , 该方案可以在微控制器上的软件中有效实现 , 同时仍对多径效应和多普勒频移具有鲁棒性 。 它使用基于脉冲的频移键控和利用算法和自定义动态峰值检测算法的计算效率高的软件定义解调方法 。
所选参数支持两千零四十八条不同的消息 , 数据速率为二十位每秒时每秒一条消息 。 期望的鱼状态 , 编码为十六位字 , 每秒从控制器传输一次 。 每个命令描述了鱼的期望状态 , 包括尾部振荡频率、振荡幅度、俯仰或深度、偏航和视频记录 。 此外 , 一次潜水专门用于在基线深度约七米的海底进行定量游泳测试 。 研究人员安装了几根预先测量好的绳索来定义参考体积于测量和拍摄机器人直线游泳、右转、左转、上潜和下潜的能力 。
并对每种能力进行了三次试验 。 在所有试验中 , 推力设置为最大 , 波动频率设置为中等 。 对于右转和左转 , 俯冲飞机设置为空档 。 对于向上或向下游泳 , 偏航设置为中性 。 偏航和俯仰对于直线游泳都是中性的 。 在每次试验开始时 , 潜水员将鱼重新定位到参考体积的一个边界平面中心的起始位置 , 然后在不推动鱼的情况下释放鱼 。 这位潜水员也在试验期间做笔记 。
【机器人|控制器和机器人之间的距离是变化的,以控制有效的通信范围】第二名潜水员从起始位置指挥所需的鱼群状态 。 另外两名潜水员从侧面和顶部拍摄了试验 , 站立或漂浮在参考体积的边界 。 在所有会话中 , 潜水员接口模块使用二十每秒的比特率每秒传输一次所需的鱼状态 。 通过记录发送器和接收器的命令日志 , 可以提取索菲成功接收和执行命令的百分比 。 此外 , 关于可达到的通信距离、真实世界障碍物对传输可靠性的影响、环境噪声的影响以及系统对周围生物的影响的定性观察是制成 。
相关经验推荐








- 红米手机|红米K50和realmeGT大师探索版,哪一个值得买?他们有什么不同?
- 电源管理|ddr5内存和ddr4内存的区别有多大?看完你就知道了
- 英特尔|戴尔 XPS 15 和 XPS 17 2022 更新采用 12 代英特尔芯片推出
- 水下机器人|控制水下机器人浮力的几种系统的介绍
- 小米手机|新买来的小米手机,这7个地方一定要设置,不然会造成手机卡顿和不安全
- 荣耀|性能只是表面现象,真正需要的还是拍照和观影,透过新机观本质
- 荣耀magic|荣耀 magic4pro和一加10pro之间,该如何选?
- 主板|全世界都关注深圳复工,而他们在家就能研发机器人
- gcc|艾利和发布真无线耳机AKUW100,主打独立DAC与自研平衡电枢单元
- 青海|展厅展馆机器人,打造智能化无人值守展厅!