文章图片
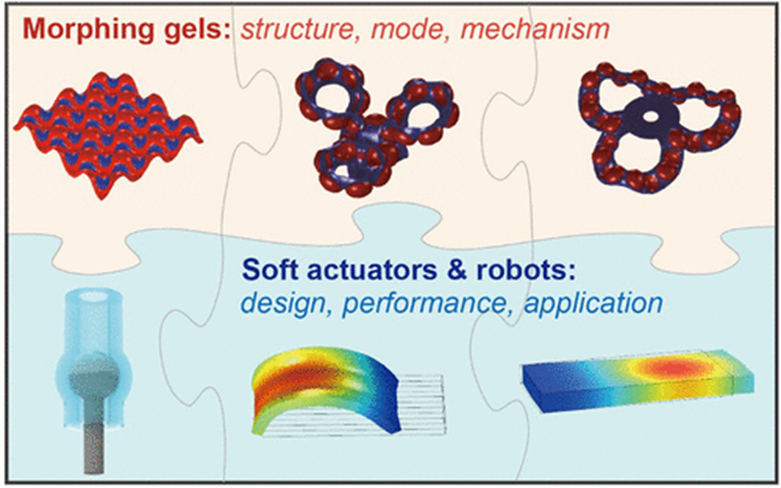
大自然为开发可以驱动、变形和移动的智能材料提供了丰富的灵感和优雅的范例 。 生物体的一项显着能力是根据刺激调整它们的形状或位置 。 植物器官的程序性变形或运动主要由细胞的吸水/脱水驱动 , 而软体动物的多功能运动则基于肌肉的收缩/伸展 。 了解这些变形和运动行为的一般原理可以为软机器人、柔性电子、生物医学设备等带来颠覆性技术 。 作为一种智能材料 , 与软生物组织具有高度相似性和对外部刺激的不同反应的水凝胶是一种构建软执行器和机器人的理想人选 。
该论文的目的是概述水凝胶可控变形和运动的基本原理 , 重点介绍相应软执行器和机器人的结构设计和响应功能 。 近年来 , 随着对自然生物体工作原理的日益了解以及制造技术的重大革命 , 该领域得到了迅速发展 , 以设计具有所需结构的仿生水凝胶系统 。 在多项开创性工作的基础上 , 已经开发出多种变形水凝胶和软致动器/机器人 , 从双层水凝胶的弯曲和折叠变形到非欧几里德水凝胶表面的自成型 , 以及从热驱动双层凝胶“手”到电驱动聚电解质凝胶“蠕虫” 。 这些变形水凝胶在生物医学和工程领域表现出积极的功能和广泛的应用 。
相关论文以题为Programmable Morphing Hydrogels for Soft Actuators and Robots: From Structure Designs to Active Functions发表在《Acc. Chem. Res.》期刊上 。 通讯作者是浙江大学吴子良教授 , 共同作者是郑强教授等人 。 参考文献:doi.org/10.1021/acs.accounts.2c00046【日立|用于软执行器和机器人的可编程变形水凝胶:从结构设计到主动功能】
相关经验推荐



![[穿越火线]BS.F演绎视觉盛宴,以绝对枪法击败完美体系](https://imgcdn.toutiaoyule.com/20210907/20210907065304750628a_t.jpeg)



- 充电器|当年在追求硬件的时候,苹果打造软件服务,率先获得市场
- 动视暴雪|动视暴雪文件称微软还未考虑CEO鲍比·科蒂克去留问题
- 软件测试|3面支付宝!一个从业4年软件测试工程师面试结束后想说的
- iPad|IPad性能太强软件跟不上?苹果记者称,苹果或推出“Pro”模式
- 软件|这9款软件你认识两个算你厉害,认识5个以上说明你真的老了
- 小米科技|5月10日微软将停止Windows10服务,不让人活了?
- 软件|电脑出现问题 , 如何断定哪个配件出现问题 ? 就用这几种软件
- 软件|电脑怎么开启护眼模式?分享一个一键使用的办法
- 微软|“50mbps”等于多少“mbs”?搞清楚MB和Mb的区别,就知道答案了
- 软件|创新业务增长99%,沧海一粟,以感知为基础智能物联未来