文章图片
文章图片
文章图片
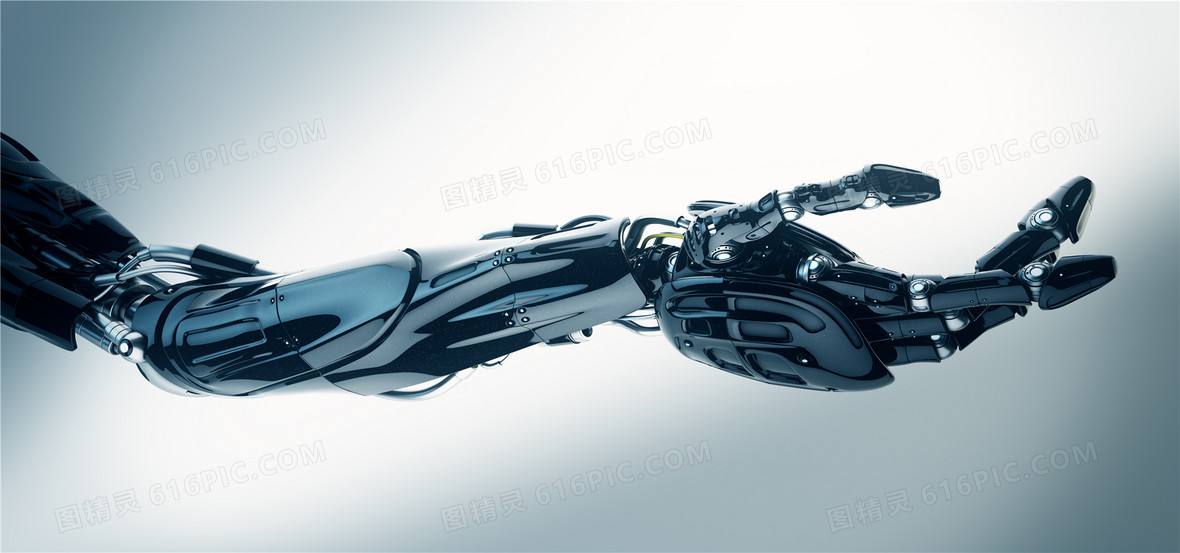
构建在日常环境中运行的机器人时的一个主要挑战是定义那些可以使机器人在社会上被人类接受的特征 。 科幻小说和认知神经科学研究激发了基于感知特征相似性的技术发展 。 因此 , 拟人化细节已被引入机器人和化身的身体和面部 , 包括面部区域的颜色变化 , 以模拟与情绪反应相关的潮红 。 然而 , 利用具体体现的认知机制的两条认知神经科学研究表明 , 一种不同但尚未探索的机器人社会接受方法也是可能的 。
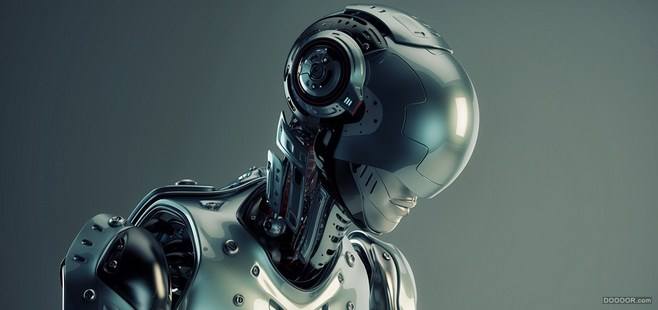
研究的第一线显示了第一人称视角和代理在单个身体部位、其他人类或虚拟现实化身-的体现中的重要性 。 例如 , 通过结合对象和人体模型之间相关的多感官信息来操纵视觉视角 , 研究人员已经产生了拥有另一个身体而不是自己的身体的错觉 。 第二条结果表明 , 具身化的影响可以远远超出身体幻觉 , 并延伸到自我和社会感知 。 因此 , 当面对伴侣的对象在与伴侣面部相同的位置同步触摸面部时 , 可能会出现一种面对面的错觉 , 这表明可以将他人身份的特征纳入自我的表征中 。
这种基于视觉触觉面部刺激的自我面部识别变化已扩展到社会和概念表征 。 例如 , Peck等人在虚拟现实环境中证明 , 浅肤色个体在深色皮肤虚拟身体中的体现减少了该个体隐含的种族偏见 。 在这里 , 研究人员首次测试了机器人的社会可接受性的可能性可以通过他们的体现来实现 。 我们开发了一个简单的程序 , 允许观察者将光束射入机器人的身体 , 促进其体现 , 并最终提高其社会接受度 。
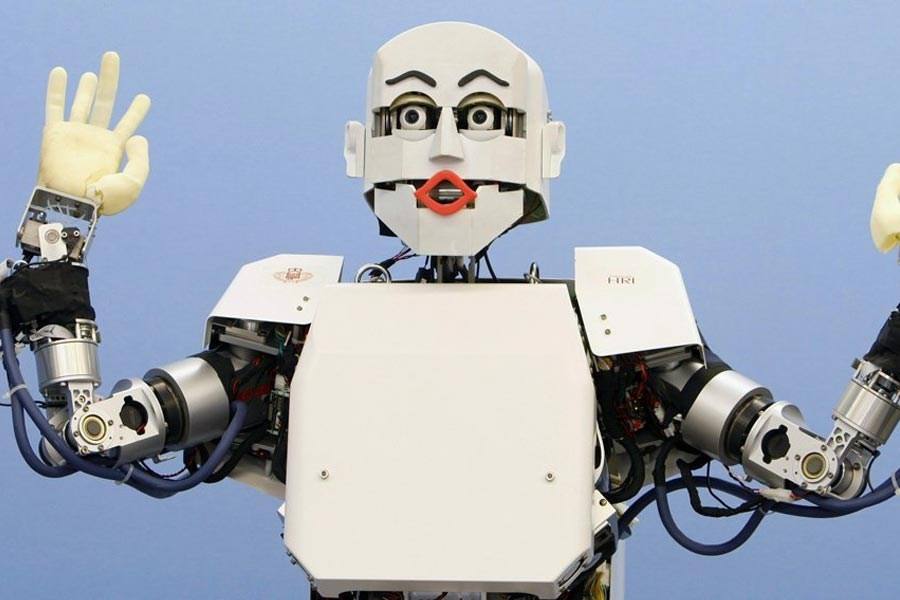
【华为荣耀|拟人化细节已被引入机器人和化身的身体和面部,包括面部区域的颜色变化】在这项研究中 , 术语“传送”或“传送”指的是一种物理运输到远处的形式 。 在此 , 射束是指在机器人中实施的方法 。 通过立体头戴式显示器 , 对象通过机器人的眼睛看到 , 并通过运动插入 。 当受试者和机器人的头部同步移动时 , 受试者会体验到控制机器人头部运动的感觉 。 这种镜像同步促进了对机器人的强烈代理感 , 虽然不那么突出 , 但在机器人体内产生了一种位置感 。
这些发现与先前对身体幻觉的观察结果一致 , 表明真实和人造身体部位之间的一致运动将产生对人造身体部位的所有权和代理的虚幻感觉 。 虽然所有权感严格取决于动作之间的一致姿势和时间同步 , 但有时在不一致或遥远的位置和异步动作中报告了代理感 。 体现的主观感觉通常发生在真实身体部位的感知位置向虚假部位的漂移 , 即所谓的本体感觉漂移 。
同样在研究中 , 与静态条件相比 , 机器人的位置感和代理感发生在同步他自己身体中的位置感的同时发展机器人身体的体现感的能力 。 使用脑机接口系统来控制类人机器人 , 当受试者想象一个动作并观察机器人执行它时 , 阿里马尔迪尼等人将具身化到机器人的手上 。 作者表明 , 使用类人手的运动想象技能比使用金属手柄更好 。 有趣的是 , 这种使用脑机接口系统的方法表明 , 机器人的体现很好地植根于视觉运动过程 。
体现的感觉来自相互冲突的身体信号的多模式整合 , 以及在运动、视觉和本体感受信号之间的运动驱动错觉的情况下 。 当在镜子中看到自己是一个机器人头部随着自己的动作而移动时 , 参与者体验到了自主控制机器人动作的生动印象 。 当来自运动命令的预测性感觉副本与支持机器人身体的代理感的有效感觉反馈相匹配时 , 就会出现这种自我产生运动的感觉 。
相关经验推荐





- 笔记本|家电新品新战略扎堆发,海尔美的华为方太长虹海信云米谁抢眼?
- 华为荣耀|红米K50 Pro优势在于续航长,而荣耀Magic4优势在于做工好,配置均衡
- 华为荣耀|Magic 4 Pro和Mate 40 Pro有什么区别?前者能够超过后者吗?
- 荣耀|12GB+256GB,荣耀新机突然上架,仅售2799元
- 华为watch|华为Watch GT Runner首次面向全球用户进行软件更新
- 华为mate|华为Mate50Pro渲染图:有不完美,超越iPhone13成为抢手货
- realme|正式确认!华为成为大赢家,外媒:苹果、谷歌断供后果出现了!
- 百度|华为智慧屏和海信社交电视哪个好,谁更值得购买?
- 华为手机|鼎桥M40低调来袭:天玑1000 Plus+华为手机外观,仅售4599元
- 华为mate|口碑还不赖:麒麟9000E被阉割的芯,为何仅给华为Mate40使用