
文章图片

文章图片
文章图片
什么是3D点云
3D点云是将标注对象进行可视化以进行更加详细的检测和分类 , 从而获取维度精准的分割 。 在获取物体表面每个采样点的空间坐标后 , 得到的是一个点的集合 , 即为“点云” 。 包括三维坐标(XYZ)、激光反射强度(Intensity)和颜色信息(RGB) 。 三维数据本身就有一定的复杂性 , 因此需要对数据先进行预处理
自动驾驶环境感知的\"见闻色\"
在自动驾驶技术中 , 其感知系统主要通过Lidar激光雷达、Camera相机、Radar毫米波雷达3个类别的传感器来进行道路环境感知
就目前自动驾驶阶段来讲 , 激光雷达是帮助自动驾驶系统进行正确感知的重要传感器
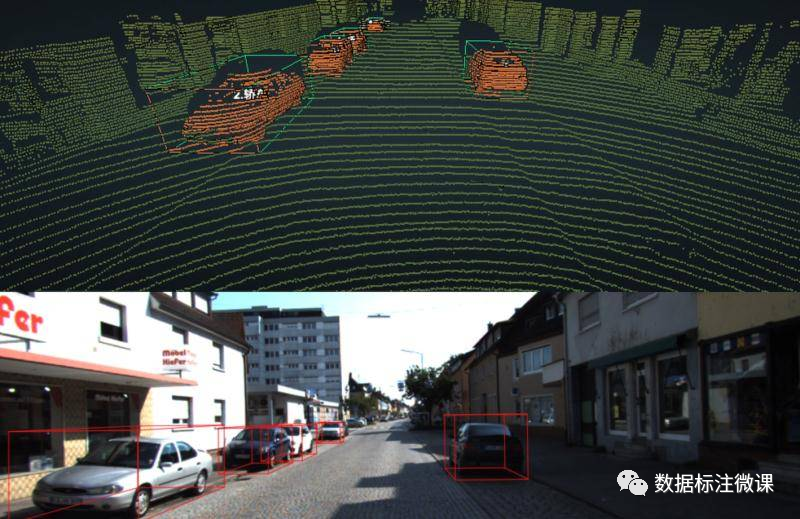
它通过发射和接受激光束 , 分析激光遇到目标对象后的折返时间 , 计算出目标对象与车的相对距离 。 并利用此过程中收集的目标对象表面大量密集的点的三维坐标、反射率和纹理等信息 , 快速复建出被测目标的三维模型及线、面、体等各种图件数据 , 建立三维点云图 , 绘制出环境地图 , 以达到环境感知的目的
简单来说 , 激光雷达最大的优势就是用3D点云为自动驾驶汽车精确\"描绘\"出周边环境
与2D图像数据相比 , 3D点云数据中包含目标的距离、角度、反射强度、速度等信息 , 不依赖于外界光照条件或目标本身的辐射特性 , 可以更好的感知汽车周边道路环境 , 为感知系统提供决策依据 , 堪称自动驾驶界的\"见闻色\"
3D点云的优点:
点云表示保留了三维空间中原始的几何信息 , 不进行离散化
3D点云的缺点:
数据集规模小、高维性、三维点云具有非建构化特性
基于激光雷达生成的3D点云图像标注
通过精细化的标注 , 3D点云数据才可以用于自动驾驶系统训练的训练
具体实现形式是在激光雷达采集的点云图像中 , 通过3D矩形或者语义分割将道路目标物体(多类型指定对象:包括但不限于车辆、建筑、树木、行人等等)精准标注出来
3D点云的应用场景
激光雷达生成的3D点云图像经过标注可以用于自动驾驶系统训练 , 随着性能的不断提升 , 自动驾驶技术需要的训练数据量也随之不断增长
3D点云标注数据是自动驾驶技术的基础训练数据 , 3D点云语义分割是指给点云中的每个点赋予相应的语义标签 , 对每个物体进行分割 , 给予每个物体特定的标签 , 使我们对四周的物体有了更加细致的了解
在自动驾驶领域中 , 通过3D点云语义分割将道路环境的点云数据进行分割 , 可以识别出自动驾驶车辆行车中的行人、道路、汽车等物体 , 使自动驾驶汽车可以在道路上安全行驶
3D点云的前景
计算机视觉的最终体现是三维视觉 , 而三维视觉的表达方式则是点云 , 点云处理在整个三维视觉领域占有非常重要的地位 , 几乎涉及所有相关领域 , 因此 , 3D点云的前景十分广阔
数据标注的重要性
AI行业中一直流传着这样一句话:“有多少智能 , 就有多少人工 。 ”这句话很大程度上道出了人工智能的本质 。 想要实现人工智能检测的精准识别 , 就需要大量的优质训练数据 , 随着人工智能技术的不断成熟 , 对场景化数据的精准度要求将越来越高 , 数据采集标注服务将变得越来越重要
相关经验推荐




![百变大侦探大魔术师真相是什么?大魔术师剧本杀凶手答案分享[多图]](http://img1.jingyanla.com/220425/21364I431-0-lp.jpg)


- path|一种能“自动充电”的电池,可以利用空气中的水分和湿气发电
- 自动化|未来什么行业有潜力,不容易被自动化取代?
- |找不到手机?只需大喊一声,手机会自动答应!学会太方便
- 佳能|用方向盘玩驾驶游戏,和用手柄以及键盘玩,有什么区别
- 浪潮|支付宝蚂蚁森林“自动收能量”攻略!速看
- Air Tag|烟灶也能“无人驾驶”?-“暴力测试”也没能难倒方太新品云魔方油烟机
- 自动驾驶|现在的手机更新换代太快了,4年前的苹果XR还能撑多久?
- 华为|特斯拉有压力了,华为城市L2级自动驾驶汽车上市,只要40万
- 亚马逊|亚马逊因自动续订被起诉,APP续费套路何时能解
- 小米科技|不和华为、小米“硬刚”,支持Siri+自动配对,39元享受HIFI音质